


Send Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

HU NAN YUBANG MAGNETIC MATERIAL CO.,LTD
The servo motor can control the speed and position accuracy very accurately, and can convert the voltage signal into torque and speed to drive the control object. A servo motor is an engine that controls the operation of a mechanical component in a servo system, and is an auxiliary motor indirect transmission. At present, the DC motor used in the CNC machine feed drive is mainly a large inertia wide speed permanent magnet DC servo motor. This section will mainly analyze and analyze this motor.
Permanent magnet DC servo motor analysis1. Basic structure and characteristics of permanent magnet DC servo motor
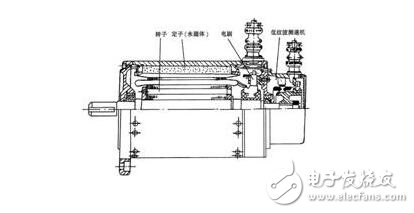
The basic structure of this kind of motor is shown in the figure, which is similar to the structure of a common DC motor, and is also composed of a stator, a rotor, a brush and a commutator. The stator magnetic pole of the motor is a permanent magnet made of a material such as alumino-nickel-cobalt alloy, neodymium-iron-boron or rare earth cobalt. The coercive force is high, and it can generate a great peak torque to meet high acceleration and deceleration. Requires; and maintains stable performance even at higher magnetic flux densities (ie, no demagnetization occurs). The number of chutes on the core of the rotor is large, and several virtual slots are distributed in one slot to reduce torque ripple. The material of the brush has also been carefully screened so that it can also have good commutation performance under large acceleration conditions. Other detection components such as a low-ripple tachometer such as a resolver or a pulse encoder can be mounted on the motor shaft, so that precise speed and position detection signals can be obtained for feedback to the speed control unit and the position control unit. The electric motor has the advantages of convenient general speed and good mechanical performance of the DC motor, and the advantage of fast response performance of the small inertia DC motor.
2. The working principle of permanent magnet DC servo motor
A schematic diagram of the working principle of the DC motor is shown in the figure.

Any one of the conductors in the rotor winding, as long as it passes through the neutral line, enters the range below the N pole of the stator from the range below the pole of the stator. Due to the action of the brush and the commutator, the conductor The current must be reversed; otherwise, the current on the conductor is reversed when the range below the N pole of the stator enters the range under the pole of the stator S. Therefore, the total magnetic potential of the rotor is orthogonal, and the electromagnetic torque of the motor is generated by the interaction between the rotor magnetic field and the stator magnetic field, thereby rotating the motor.
The mechanical characteristic is the static characteristic of the motor, which is the performance that drives the load during stable operation. At this time, the electromagnetic torque is equal to the external load. When the motor drives the load, the motor speed and the ideal speed produce a rotational speed difference Δn, which reflects the hardness of the mechanical characteristics of the motor. The smaller the Δn, the harder the mechanical characteristics and the better the performance.
Thermal resistance and time constant test of permanent magnet servo motorThermal resistance is a comprehensive parameter that reacts to prevent heat transfer. Motor thermal resistance refers to the resistance to heat flow from the heat source (winding, iron core, etc.) in the motor to the cooling medium. The thermal time constant is also called the thermal response time. The thermal time constant of the motor is the time required for the motor winding temperature rise to reach 63.2% of the stable value under the technical specifications of constant power consumption.
The thermal model of the motor contains several thermal time constants. For the sake of analysis, we usually use a model (Fig. 1: motor thermal model) to test the thermal time constant and thermal resistance. The following is a thermal resistance test of the permanent magnet servo motor. And the thermal time constant test is described in detail.
1. Permanent magnet servo motor thermal resistance, thermal time constant test conditions
In order to facilitate the uniform heat dissipation of the motor itself during the test, the motor under test can be operated at a low speed (less than 5r/min), and the heat sink is insulated from other contact parts. The test was carried out under constant temperature conditions. In the case of a fan motor, the test shall be carried out under the specified cooling conditions of the fan motor.

Description:
P——power loss in watts (W);
TC - heat capacity, the unit is the coke per opening (J / K);
Rth - thermal resistance in units of opening per watt (K/W)
(Δθ)a——temperature rise at ambient temperature in units of open (K);
Θa - ambient temperature in degrees Celsius (°C).
2, permanent magnet servo motor thermal resistance, thermal time constant test procedure
The permanent magnet servo motor thermal resistance and thermal time constant test are carried out according to the following steps:
(a) drive the motor with a current not greater than the maximum continuous current value and bring the motor to thermal equilibrium;
(b) determining the temperature rise (Δθ)a;
(c) Multiply (Δθ)a by 0.368, and add the ambient temperature θa;
(d) Disconnect the power supply and record the time t required for the temperature of the motor to drop to the temperature value calculated in step c);
(e) Calculate the power loss with P = I^2R, where I is the current value and R is the winding resistance at θf.
(f) The thermal time constant τth = TC * Rth, which is the time t recorded in step d), then the thermal resistance Rth = (Δθ) a / P, the determination of relevant parameters during the test can be seen in Figure 2.

Description:
Τth=——thermal time constant in minutes (min);
Θf——the temperature at which the heat is stable, in degrees Celsius (°C);
Θa - ambient temperature in degrees Celsius (°C);
Θt - the temperature at time t, in degrees Celsius (°C).

October 15, 2024

September 18, 2024

April 20, 2024
Gửi email cho nhà cung cấp này
October 15, 2024
September 18, 2024
April 20, 2024
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.